Falando de robôs, normalmente a impressão de que eles são como "Transformers" (transformadores) como um símbolo de força, velocidade e grande homem duro, mas do Instituto Federal Suíço de Tecnologia, em Lausanne (EPFL) Pesquisadores Quedui "Super Marines" (Big herói) como macio branco Meng software robô fraquinho.

EPFL Reconfigurable Robotics Laboratory (RRL) pesquisadores usados atuadores de software desenvolveu uma série de, robôs de software reconfiguráveis, artigos de pesquisa macios, flexíveis publicados na "ciência" (relatórios científicos), "robot software" (soft Robotics) e outras revistas internacionais.
Software robô actuador geralmente consiste de software semelhante ao músculo humano, e o material macio do actuador é tipicamente um material, tal como elastomérico de silicone e borracha, que é seguro em si. Tipicamente, a porção de corpo do robô software será concebido para uma "almofada de ar suave" específica, assim será capaz de Características de software para controlar o movimento do robô utilizando pressão de ar.
Portanto, de baixo custo de material robô de software, fácil de controlar e fácil de produção em massa, usados para projetar um acessório wearable em pacientes após a reabilitação, manipulando itens frágeis, sistemas biomiméticos, bem como home care e outros aspectos de um grande aplicações potenciais.

Gong Jia Agarwal (Gunjan Agarwal), Matthew Robertson (Matthew Robertson) e Jamie Pa Yike (Jamie Paik). Fonte: EPFL
RRL diretor Jamie Pa Yike (Jamie Paik) disse: "Nosso projeto robô software atribui grande importância à segurança, como usar o exoesqueleto material de tal software para fazer a reabilitação, a probabilidade de lesão é muito pequena."
modelo de controle de atuador Software
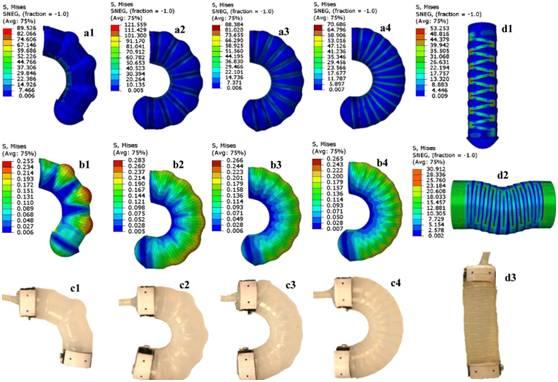
A primeira linha representa o software geral (dura e mole) os resultados da simulação robô de stress; segunda linha representa a simulação estresse robô de software núcleo macio; terceira linha é os resultados experimentais correspondentes. Fonte: DOI: 10.1038 / srep34224
Os pesquisadores realizaram uma série de simulação numérica, o software de controle de movimento do robô é proposto modelo de previsão para prever com precisão as características de movimento de cada módulo de software. O módulo de software é composto de uma pluralidade de câmaras de ar e a composição intercamada, modelo diferente, software robô pode ser esticado ao seu comprimento original é de cinco a seis vezes, e pode ser dobrado em duas direções.
Os investigadores Agarwal tributo bom (Gunjan Agarwal), disse: "Depois de várias experiências de simulação, propomos um modelo de previsão de deformação do corpo macio de robô movimento, podem prever o resultado da deformação do actuador de acordo com a forma variáveis diferentes, espessura e materiais de fabricação ".
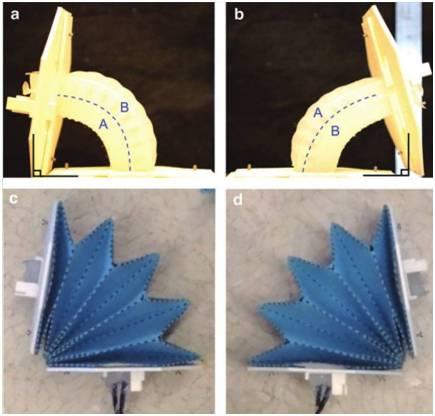
software habitação atuador pneumático papel plissado (Soft atuadores pneumáticos, SPA) biaxiais dobra movimento. Fonte: DOI: 10,1089 / soro.2016.0023
Uma é usar o robô de software como de um software de pregas de papel grosso de cartão de actuador pneumático (SPA) da caixa, os resultados experimentais mostram o movimento dos investigadores propuseram Predictive Model para materiais diferentes.
Agarwal disse: "estrutura de material elástico com alta resistência, características de recuperação rápida, mas é difícil de controlar, devemos ser capazes de prever a deformação da direção e por causa deste tipo de robôs de software são fáceis de produzir, mas difícil de controlar, por isso estamos. publicação online de nossas ferramentas de desenvolvimento e design progressivo para os entusiastas de ajuda e estudantes a robótica ".

Com o software reabilitação usável auxiliar, a terapia física pode ser usado para ajudar. Fonte: EPFL
Wearable auxiliar na reabilitação
Além de simulação, os pesquisadores RRL também desenvolveu um robô de software tem um uso médico, resultados de pesquisa publicados na "robot software" (SoftRobotics). Um tipo de reabilitação médica de software são robôs de software com uma pluralidade de componentes infláveis que é usado para ajudar a orientar o paciente e operação de recuperação retos de treinamento de reabilitação.
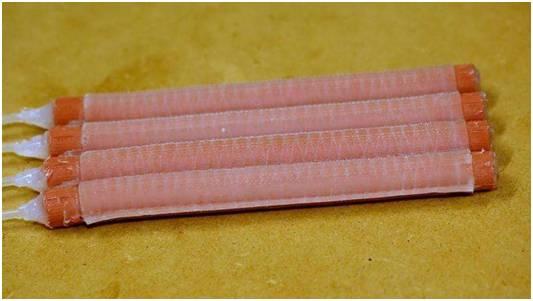
recuperação de software da fita é enrolada configuração de software de borracha linha linha de pesca, ligando sistema de bomba de ar. Fonte: EPFL

controle pneumático flexão banda reabilitação. Fonte: EPFL
Tal recuperação de software com uma fileira de borracha software do robô (rosa) e feito de uma linha de pesca transparente, e uma bomba externa ligada a uma porção do sistema de recuperação, quando o controle da pressão é introduzido de controlo, para a linha de pesca pode ser guiada precisamente módulos de software deformação.
O líder do projeto Matthew Robertson (Matthew Robertson) disse: "A próxima meta é reduzir o sistema de bomba e integrá-lo diretamente para a reabilitação com ele mesmo no presente, estamos a trabalhar com a Universidade de Lausanne Medical School (CHUV) tratamento de pacientes com AVC. terapeutas cooperação, com um robô de software que a reabilitação pode ajudar a suportar o tronco do paciente e restaurar a sensibilidade muscular. "
robot reconfigurável Adaptive
Potencial robô de software aplicativos é muito mais do que isso. Os pesquisadores também desenvolveram robôs de software adaptativos, para navegar em ambientes estreitos ou agressivos. Porque o robô software tem um alto grau de flexibilidade, por isso deve ser capaz de suportar aperto pressão.
Pa Yike, disse: " Atuadores usando o software, podemos desenvolver um robô software capaz de se adaptar a diferentes ambientes de diferentes formas. E fabricação de materiais de baixo custo e fácil de produção em massa. Esta será a chave de ouro para os robôs do Novo Mundo! "
referência:
1.G. Agarwal, N. Besuchet, B. N. Audergon e J. Paik. Esticável Materialsfor robustos atuadores maleável para a assistivas Wearable Devices, relatórios inScientific, vol. 6, Num. 34224, de 2016.
2.M. A. Robertson, H. Sadeghi, J. M. Florez e J. Paik. Macio PneumaticActuator Fascículos para alta força e confiabilidade, aceite em SoftRobotics de 2016.
3.L. Paez, G. Agarwal e J. Paik. Projeto e Análise de um PneumaticActuator suave com Origami Shell Reforço, em suave Robotics, vol. 3, num. 3, de 2016.
4.http: //phys.org/news/2016-10-soft-robots-mimic-human-muscles.html#jCp